已解决伺服传感器的工作原理是什么?
提问者:陳生足球理財 | 浏览次 | 提问时间:2017-07-01 | 回答数量:1
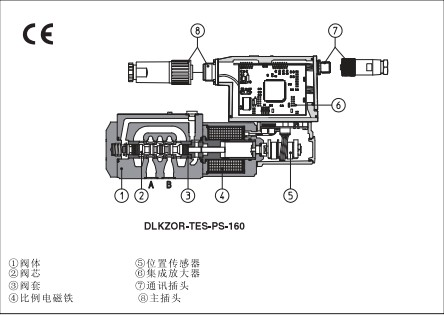 伺服驱动器(servodrives)又称为"伺服控制器"、"伺服放大器",是用来控制伺服电机的一种控制器,其作用类似于变频器作用于普通交流马达,属于伺服系统的一部分,主要应用于高精...
伺服驱动器(servodrives)又称为"伺服控制器"、"伺服放大器",是用来控制伺服电机的一种控制器,其作用类似于变频器作用于普通交流马达,属于伺服系统的一部分,主要应用于高精...
提问者:陳生足球理財 | 浏览次 | 提问时间:2017-07-01 | 回答数量:1
伺服驱动器(servodrives)又称为"伺服控制器"、"伺服放大器",是用来控制伺服电机的一种控制器,其作用类似于变频器作用于普通交流马达,属于伺服系统的一部分,主要应用于高精...

irislight
回答数:149073 | 被采纳数:43

今天给大家带来求解画面分割器的性能与原理,画面分割器的性能与原理是什么,让您轻松解决问题。在有多个摄像机组成的电视监控系统中,通常采用视频切换器使多路图像在一台监视器上轮流显示。...
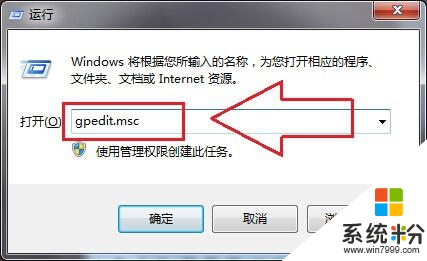
W7系统在使用的时候发现系统有点顿卡,那么这个时候我们可以将一些不必要的功能关闭掉,比如传感器,只是W7系统怎么取消传感器?需要哪些步骤?下面小编就跟大家收说取消的方法。W7取消...
今天给大家带来教你知道什么是企业服务器,到底什么才是企业服务器,让您轻松解决问题。企业级服务器是属于高档服务器行列,正因如此,能生产这种服务器的企业也不是很多,但同样因没有行业标准...
今天给大家带来怎样查询DNS服务器工作是否正常?,查询DNS服务器工作是否正常的方法有哪些?,让您轻松解决问题。看看自己计算机使用的DNS地址是多少,并且查询他的运行情况。具体方法...